
Threaded View


-
15-11-2016 #4

 Current Activity: Viewing
Current Activity: Viewing




Now having decided what general direction I wanted to go with the mechanics, it was time to look at controller options. For me personally, I prefer Dynomotion KFlops, as they are probably one of the most versatile controller available for the price, but this left me the problem of deciding what add-on boards were needed.
.
The first thing to consider was what input/output capability was needed.
For this purpose, I create a spreadsheet, and list every input/output I need, along with a note of the type of input/output needed. At the current count it's 28 inputs (2 analogue for SSO&FRO, 1 encoder input for a MPG, with the rest being basic on/offs), and 9 outputs (1 analogue with rest on/offs), along with the currently required 3 step/dir outputs.
.
I could of opted for a KStep board, which would of met the needs for driving stepper motors, albeit at a slightly lower voltage (it has a max Voltage of 50V), but it lacks any kind of analogue input.
.
The other option, was to use a Kanalog. Now this is primarily aimed at retrofits on machines using +/-10V servos, however as I'd like to keep my options open, it provides a good upgrade path. It also has analogue inputs, and differential encoder receivers.
It also so happens I already had a spare one sat on a shelf, along with a Konnect expansion board, which means I've got more inputs and outputs than required.
.
The only draw back was I'd like to make use of the differential inputs on the EM806's, and Dynomotion have nothing that outputs differential step/dir signals. So a solution was needed, and it came in the creation of this board-
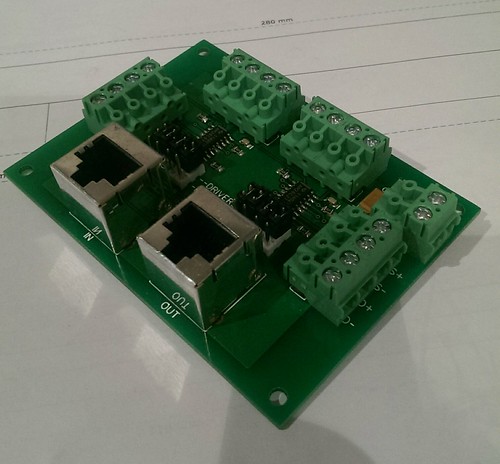
On the KFlop, in standard configuration, the encoder pins also double up as the step/dir pins, of which 8 of them happen to go through a separate RJ45 connection (the other 8 go through one of the ribbon cables). This board takes those 8 lines, and by moving the jumpers, either routes them directly through to the Kanalog to be used as encoder inputs, or to the line driver chips on the board to be used as differential/line driven outputs.
So that was the step/dir differential outputs taken care of.Avoiding the rubbish customer service from AluminiumWarehouse since July '13.

 Reply With Quote
Reply With QuoteThread Information
Users Browsing this Thread
There are currently 7 users browsing this thread. (0 members and 7 guests)
Similar Threads
-
Denford Triac - Help
By mikeadams1985 in forum Denford MillsReplies: 1Last Post: 12-01-2017, 10:06 AM -
FOR SALE: Denford Triac CNC PC
By ricey3 in forum Items For SaleReplies: 6Last Post: 10-01-2017, 01:39 PM -
Denford Triac VMC
By fidia in forum Milling Machines, Builds & ConversionsReplies: 6Last Post: 19-08-2016, 08:18 AM -
Help Denford triac p.c.
By mikeulike in forum Denford MillsReplies: 3Last Post: 02-06-2015, 03:59 PM -
WANTED: Denford Triac
By edwardsjc in forum Items WantedReplies: 13Last Post: 20-08-2012, 08:17 AM

Bookmarks