
Thread: denford triac rigid tapping
Hybrid View


-
24-01-2018 #1

 Last Activity: 6 Hours Ago
Last Activity: 6 Hours Ago



You need accurate enough spindle control so that you can stop it within a reasonable tolerance, unless you plan on having a very wide tolerance on tapping depth.
To give you an idea of the space problem, this is a 110mm square plate which the servo motor bolts to on top of the spacer -
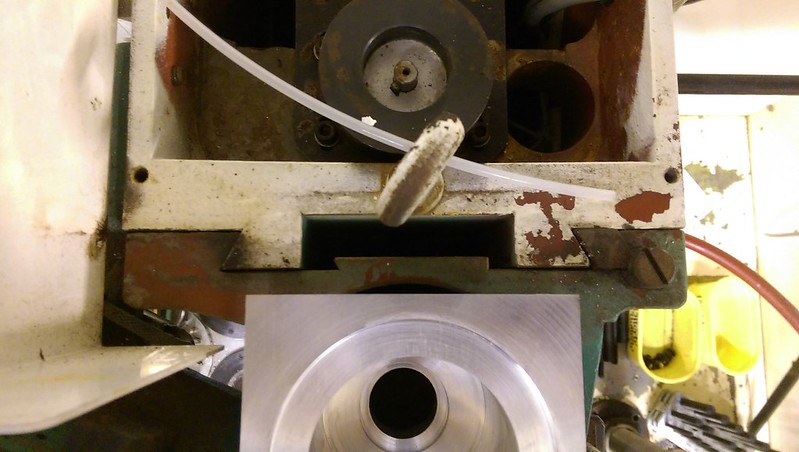
The spacer is high enough to get reasonable bearing spread between the two support bearings for the extension shaft, and a flexible coupler.
I have a model of the Triac head casting in Fusion360 if you want to see what will work.
IIRC you could probably get a 130 frame motor on, if you wanted a bit more power.Avoiding the rubbish customer service from AluminiumWarehouse since July '13.
-
24-01-2018 #2
Last Activity: 6 Hours Ago
This post onwards covers the servo and the mount - http://www.mycncuk.com/threads/10344...9732#post89732
Avoiding the rubbish customer service from AluminiumWarehouse since July '13.
-
The Following User Says Thank You to m_c For This Useful Post:
-
25-01-2018 #3
Last Activity: 20-05-2026
Got some tapmatic tapping heads for my triac, work a treat
-
The Following User Says Thank You to andy_con For This Useful Post:
-
25-01-2018 #4
Last Activity: 23-05-2023

as uccnc fully supports rigid tapping- and others are using it daily id like to add it to the triac.
if i run into problems- il go with tapping head .
to be fair with the amount of real paying work i have its going to be a while before the new "hobby machine" gets done.
-
26-01-2018 #5
Last Activity: 20-05-2026
Is it really worth the cost and effort, use threadmills
-
21-05-2018 #6
Last Activity: 23-05-2023
Does anyone have a spare encoder cable or just encoder plug for fanuc red cap
Only required for test rig to set up my new drives.
Terminal layout is different to most motors- pain!
-
29-05-2018 #7
Last Activity: 23-05-2023
Got the red caps running perfectly on step/ direction
:-)
-
29-05-2018 #8
Last Activity: 23-05-2023

 Reply With Quote
Reply With QuoteThread Information
Users Browsing this Thread
There are currently 1 users browsing this thread. (0 members and 1 guests)
Similar Threads
-
FOR SALE: Denford Triac PC inc Denford table plus chucks, and Denford CD software etc
By Piero franchi in forum Items For SaleReplies: 8Last Post: 14-02-2017, 04:47 PM -
FOR SALE: Denford Triac + Denford Orac + other stuff
By Clive S in forum Items For SaleReplies: 6Last Post: 06-02-2017, 11:47 PM -
Denford Triac - Help
By mikeadams1985 in forum Denford MillsReplies: 1Last Post: 12-01-2017, 10:06 AM -
FOR SALE: Denford Triac
By asto in forum Items For SaleReplies: 19Last Post: 07-02-2016, 08:28 PM -
WANTED: Denford Triac
By edwardsjc in forum Items WantedReplies: 13Last Post: 20-08-2012, 08:17 AM

Bookmarks